お台場でのロボットの自律走行実証による関連データを公開しました
NEDOの先導研究プログラムである「異種・多様なロボットを支える継続学習型ソーシャルツイン基盤」関連データを公開しました
TDV による お台場でのロボットの自律走行実証関連データのダウンロード
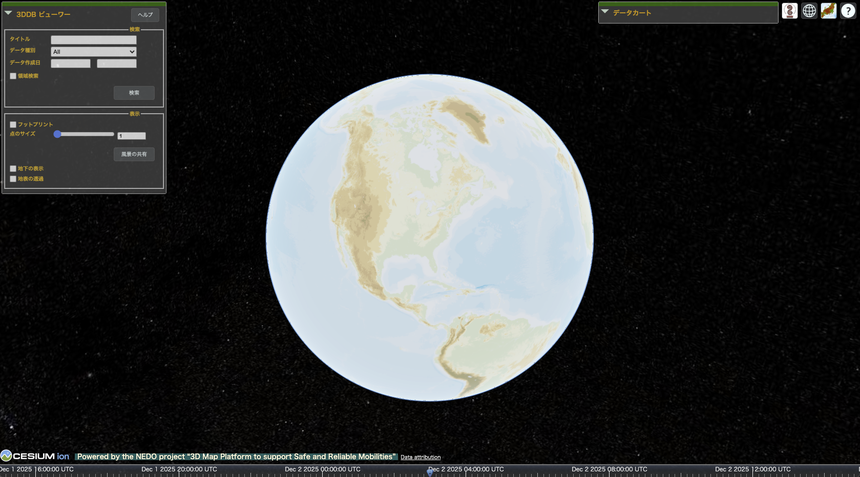
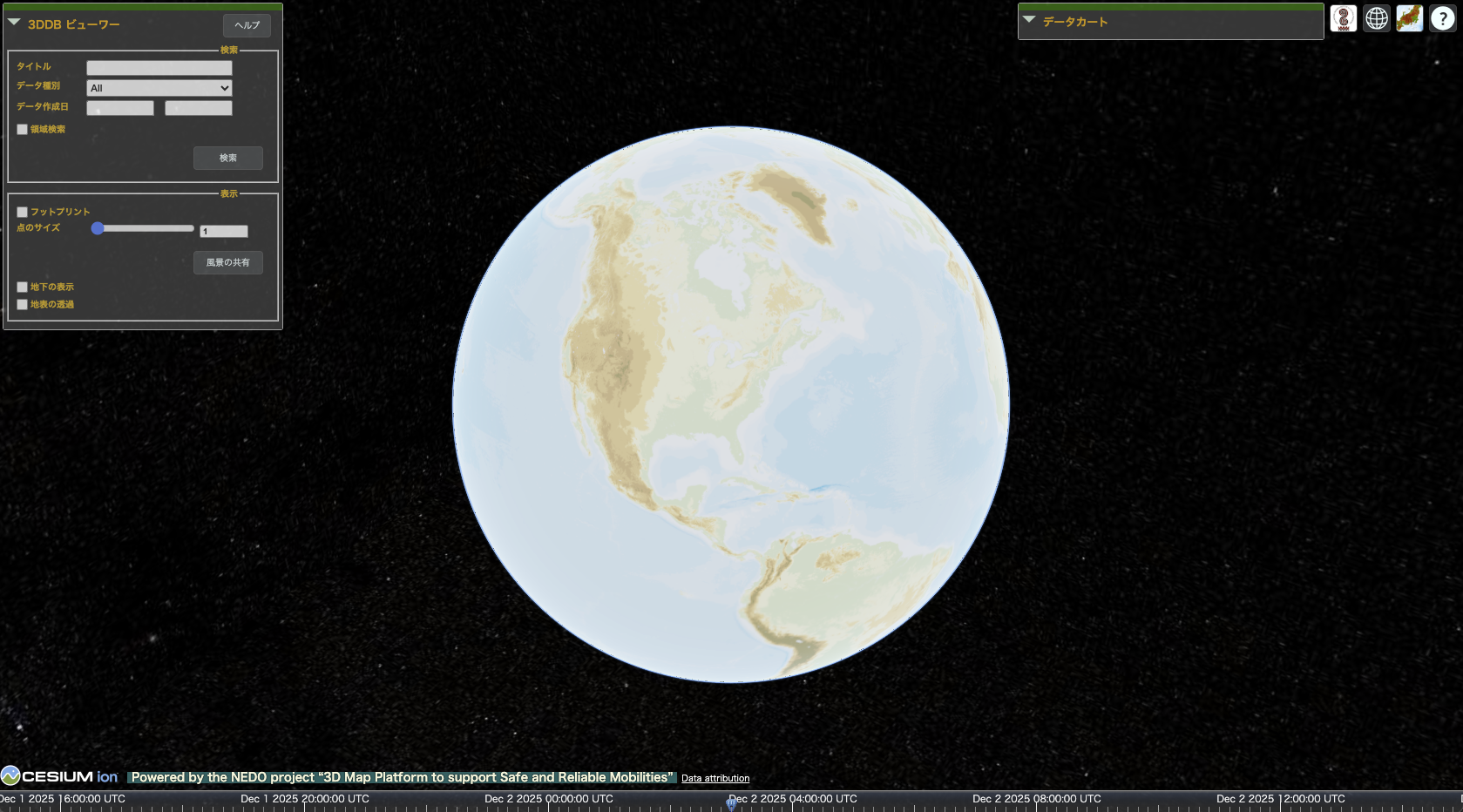
TDV の起動
-
データのダウンロード
-
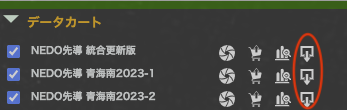
ダウンロードを希望するデータのダウンロードボタンをクリックします。
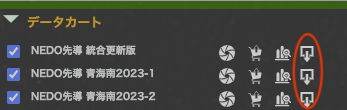
- データのタイトル、ライセンスおよび、データのダウンロードボタンが表示されるので、ご了承いただける場合は希望するデータのダウンロードボタンをクリックします。
※ ライセンスの情報が長い場合、下までのスクロール操作が必要となります。